![]() This image is released under a CC BY-NC-SA 4.0
Licence
This image is released under a CC BY-NC-SA 4.0
Licence
Buy this image as a print
BuyLicense this image for commercial use at Science and Society Picture Library
License![]() This image is released under a CC BY-NC-SA 4.0
Licence
This image is released under a CC BY-NC-SA 4.0
Licence
Buy this image as a print
BuyLicense this image for commercial use at Science and Society Picture Library
License![]() This image is released under a CC BY-NC-SA 4.0
Licence
This image is released under a CC BY-NC-SA 4.0
Licence
Buy this image as a print
BuyLicense this image for commercial use at Science and Society Picture Library
License
Science Museum Group
© The Board of Trustees of the Science Museum
Science Museum Group
© The Board of Trustees of the Science Museum
Science Museum Group
© The Board of Trustees of the Science Museum
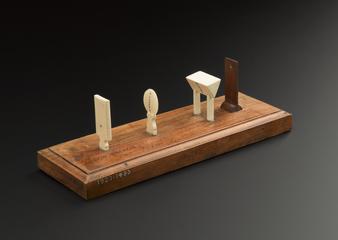
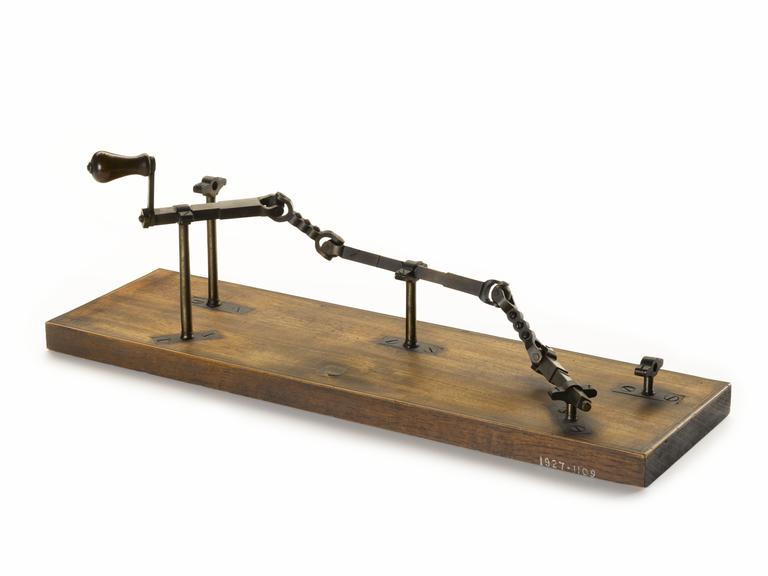
Model of Robert Hooke's universal joint made by Mr Pease, probably in London, in 1760 and owned by Stephen Demainbray.
This model is thought to have been made by Mr Pease, a spring-maker in London. It was itemised in the Queen's Catalogue and therefore believed to have belonged to Stephen Demainbray. Demainbray worked as superintendent at the King's observatory at Kew from 1768 and his collection of instruments and apparatus was absorbed into the King's own collection. Using two double joints, rotary motion can be transferred from one shaft, through a second, to a third that is orientated at a right-angle to the first. This type of joint has been attributed to Hooke sinc he described it in detail in his Cutlerian Lectures of 1679. The model is demonstrated by truning the handle.
Details
- Category:
- King George III
- Object Number:
- 1927-1109
- type:
- model - representation
- credit:
- King's College, London