Robotuna, Prototype Underwater Robot, 1995
- maker:
- Michael S. Triantafyllou
![]() This image is released under a CC BY-NC-SA 4.0
Licence
This image is released under a CC BY-NC-SA 4.0
Licence
License this image for commercial use at Science and Society Picture Library
License
Science Museum Group
© The Board of Trustees of the Science Museum
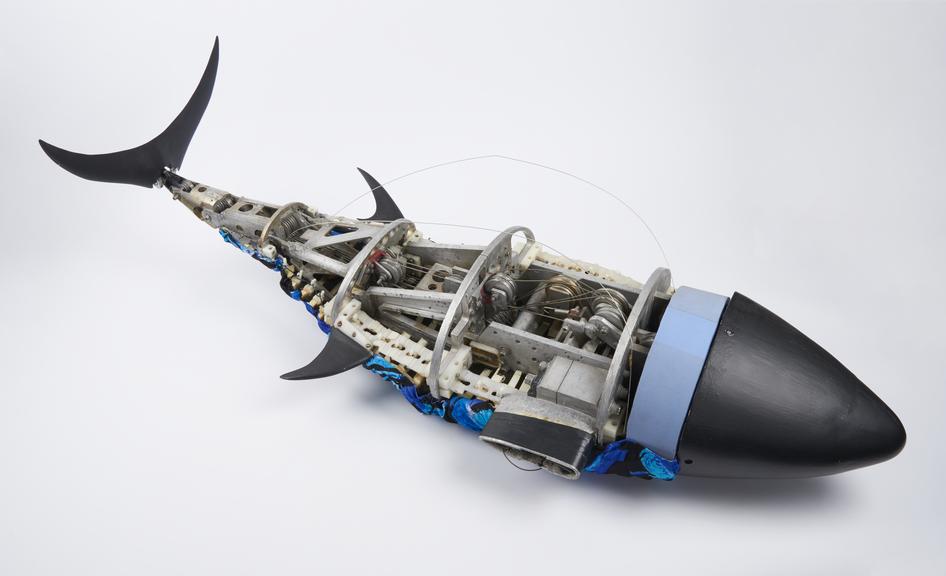
Prototype of biomimetic underwater robot developed by the Massachusetts Institute of Technology, known as 'Robotuna', 1995.
The RoboTuna was designed and built at MIT in 1992 by naval architect and professor of ocean engineering Michael S. Triantafyllou, his brother George Triantafyllou, a naval architect, Dr. David Barrett, then a Ph.D. candidate at MIT, and Mark Grosenbaugh, a marine engineer at Woods Hole Oceanographic Institution in Massachusetts. RoboTuna is the first-ever attempt to make underwater robots more efficient by mimicking the bluefin tuna (Thunnus thynnus), nature's most efficient swimmer. RoboTuna is a landmark example of biomimetic engineering and early autonomous underwater vehicle (AUV) innovation. Through its production the team made key discoveries that advanced the understanding of vorticity control (manipulating water flow) and fish locomotion.
The team built off of the research of physiologist James Gray, who suspected that fish had some control of the water around them due to their low muscle mass, adapted the Strouhal number, which determines a fish’s weight’s influence on the vortices it forms when swimming, and ultimately drew the conclusion that fish use vorticity control to propel themselves through the water and the timing.
To prove their theory, they built RoboTuna with eight jointed sections, six internal motors, and a complex internal system of pulleys and strings (i.e., muscles and tendons), all of which are visible on the object, enabling it to manipulate eddies of water. The prototype, was first tested in July 1994 with a RoboTuna named Charlie (aka the Testing Tank Tuna). About four feet long, Charlie closely resembled a real tuna, with 2,843 parts, including 40 ribs, a set of tendons, a segmented backbone with vertebrae, and Lycra skin to prevent drag.
The research enhanced science’s understanding of the fluid mechanics of swimming by demonstrating that the body of the fish, rather than its tail, generated the strongest vortices in the water, which ultimately propelled the fish forward. Another key factor of RoboTuna’s success was the plan to evolve the computer control system based on the design of genes that produce increasingly efficient control systems. The original goal was to develop a better propulsion system for autonomous underwater vehicles (AUVs) and their possible applications to submarines or even surface ships.
The team equipped RoboTuna with controls and sensors to map temperature and pressure gradients, as well as nutrient concentrations, in the ocean. At the same time, human scientists operated safely on a support vessel. It could also be used to map the ocean floor, especially in hazardous conditions such as near thermal vents, to monitor the condition of underwater equipment like oil rigs, optical fibre cables, and ships, as well as to locate pollution sources. It represents innovation and experimentation at a time when oceanographers were beginning to embrace autonomy in instruments and hardware, drawing inspiration from nature.
The creation of this prototype yielded valuable insights, for example, the limited underwater time due to the battery’s low capacity. However, RoboTuna did use less energy and proved to be more maneuverable than other robotic submarines. There have already been several “descendants” of RoboTuna, including a RoboPike and a free-swimming robotic tuna developed at Draper Laboratory by Jamie Anderson called VCUUV (for Vorticity Control Unmanned Undersea Vehicle).
RoboTuna lies at the intersection of biology, engineering, and oceanography, offering insight into robots, biomimetics, deep-sea exploration, and the role of engineering in science.
Details
- Category:
- Oceanography
- Object Number:
- L2000-4475
- Materials:
- aluminium alloy, plastic (unidentified), stainless steel, rubber (unidentified), polypropylene, synthetic textile and steel (metal)
- Measurements:
-
overall: 12.57kg
overall (estimate): 210 mm x 1240 mm x 360 mm, 12.57kg
Related Objects
Close's Fisherman's Chart 1958

Bottom sampler
Ship-board salinometer
